The ViWi Dataset Scenarios
1) The ASU Downtonw Scenario (ASUDT1) - (multi-user)
Description of the Scenario
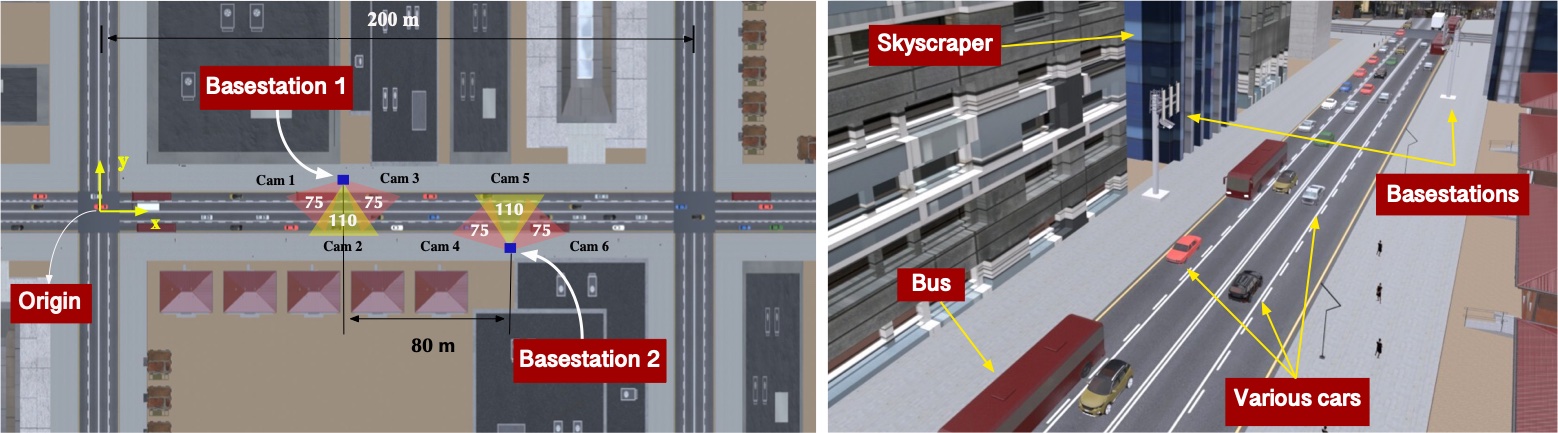
Overview: This ASU Downtown 1 scenario, "ASUDT1", is an outdoor scenario with multiple wireless users. It depicts a busy downtown street with its various elements, e.g., cars, buses, trucks, skyscrapers, buildings, lamp posts,...etc. In this scenario, every vehicle is equipped with a mmWave omini-directional wireless receiver. There are two basestations each of which is equipped with a parameterized antenna array, i.e., the size and shape of the antenna array could be customized using the generation script. There are three differently-oriented cameras installed at each basestation. The fields of view of those cameras are overlapping, see the topview photo of the scenario.
Key components:
Basestations: There are two basestations set at (x,y,z) = (80,14,4.5) and (x,y,z) = (160,-14,4.5). Each one has a 28 GHz mmWave antenna array and three differently-oriented cameras. Cameras 1,2, and 3 are installed at basestation 1, and cameras 4, 5, and 6 are installed at basestation 2. The side cameras (1, 3, 4, and 6) have a field of view of 75 degrees while the central cameras (2 and 5) have a wider view of 110 degrees. The distance between the two basestations is 80 meters, and they have a shared camera field of view. In particular, camera 3 and 4 view the same segment of the street.
Car trajectries: Each vehicle drives along the street in one of four lanes. Lanes 1 and 2 have vehicles moving along the negative x-axis, and the center of each is y = 1.875 m and 5.625 m. Lanes 3 and 4 have vehicles moving along the positive x-axis with centers at y = -1.875 m and -5.625 m. A vehicle stays in one lane and only switches once it reaches the end of the street.
Vehicles: There is a total of 60 vehicles in the scenario, 52 cars, 3 trucks, and 5 buses. Not all of them are visible at any instance (scene) as they are continuously moving, entering and leaving the environment.
Version support: Version 2
Data filees for the ASUDT_28 Scenario
Source data:
Scenario name: ‘ASUDT1_28’
Links: LiDAR data, wireless data, visual data, and scenario attributes.
2) The Colocated-Camera Scenario with Blocked View (Single User)

Description of the Scenario
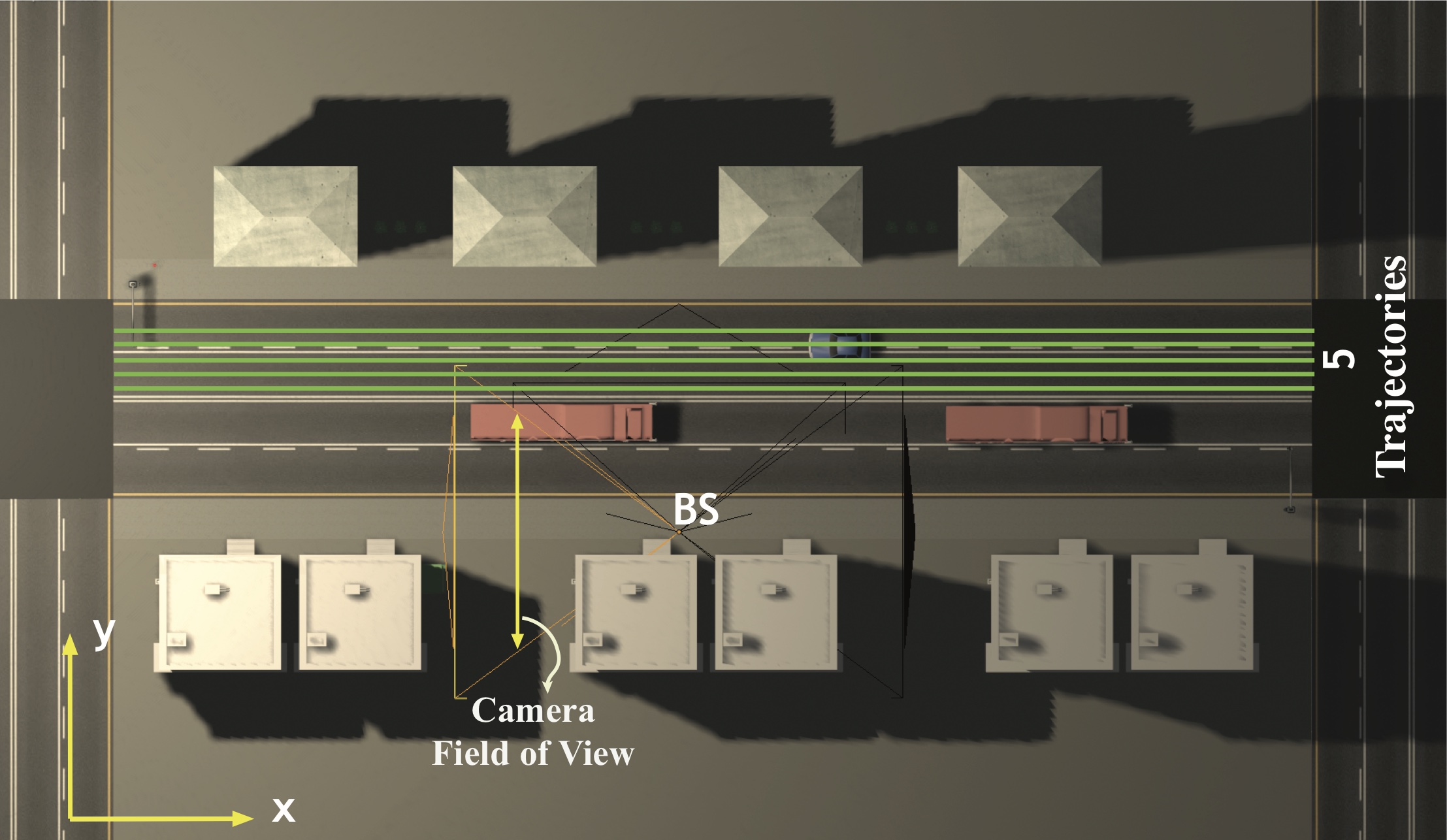
Overview: This scenario, "colo_cam_blk", is an outdoor scenario depicting a single car driving through a city street with two stationary buses. It has a single Base Station (BS) equipped with a mmWave antenna and 3 cameras.
Key components:
Base Station: It has one mmWave antenna and three differently-oriented cameras with the following fields of view 75, 100, and 75 degrees, respectively. The BS is set at 5 meters high and in the middle of the street.
Car trajeectories: The car goes through one of five trajectories, each of which is 90 meters long and has 1000 equally spaced points (0.089 m). Hence, they, all together, creeate a 5000-point user grid.
Version support: Version 1
Data filees for the colo_cam_blk Scenario
Source data:
Scenario name: ‘colo_cam_blk’
Link: Available here
3) The Colocated-Camera Scenario with Direct View (Single User)

Description of the Scenario
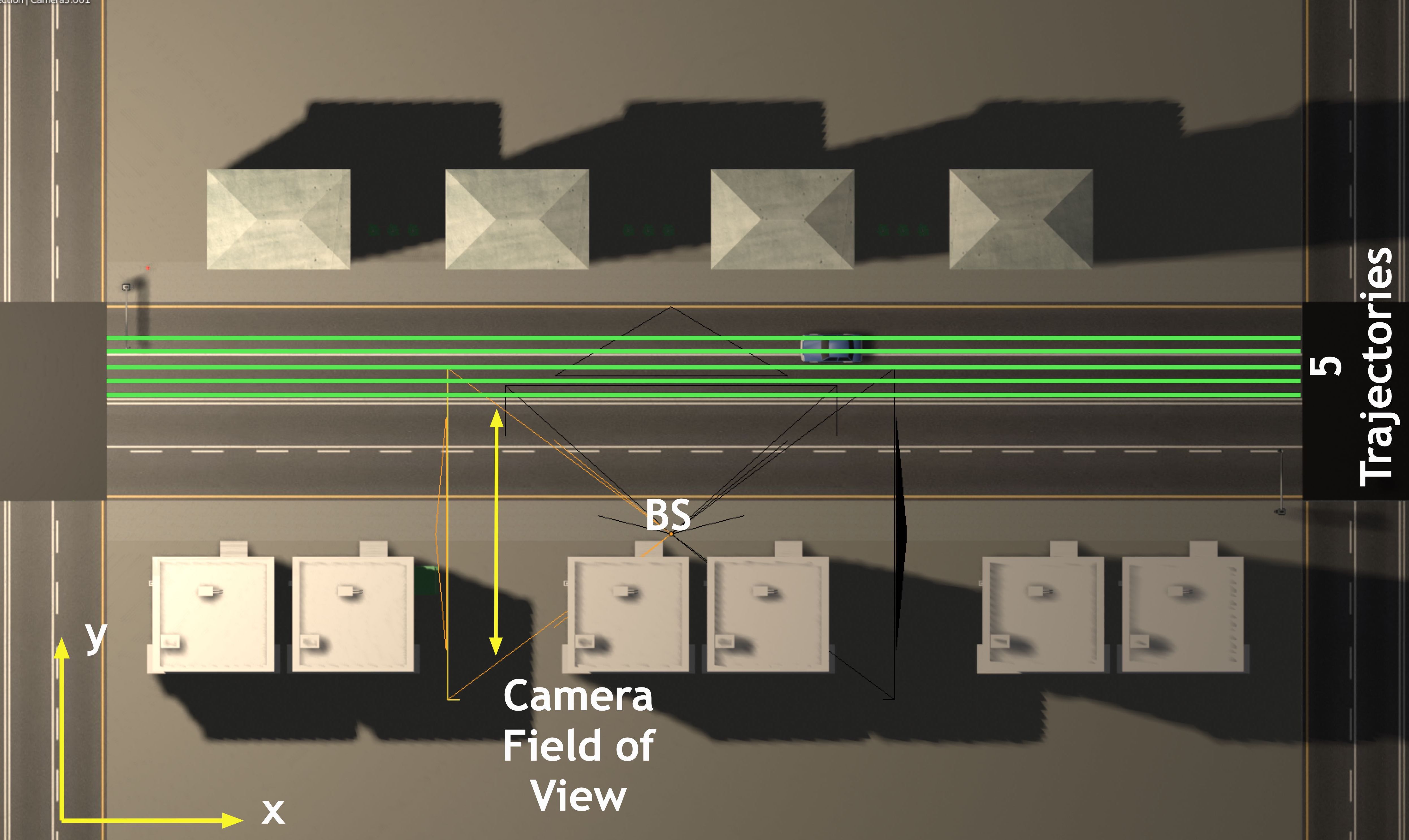
Overview: This scenario, "colo_cam", is an outdoor scenario depicting a single car driving through a city street. It has a single Base Station (BS) equipped with a mmWave antenna and 3 cameras.
Key components:
Base Station: It has one mmWave antenna and three differently-oriented cameras with the following fields of view 75, 100, and 75 degrees, respectively. The BS is set at 5 meters high and in the middle of the street.
Car trajeectories: The car goes through one of five trajectories, each of which is 90 meters long and has 1000 equally spaced points (0.089 m). Hence, they, all together, creeate a 5000-point user grid.
Version support: Version 1
Data filees for the colo_cam Scenario
Source data:
Scenario name: ‘colo_cam’
Link: Available here
4) The Distributed-Camera Scenario with Blocked View (Single User)

Description of the Scenario
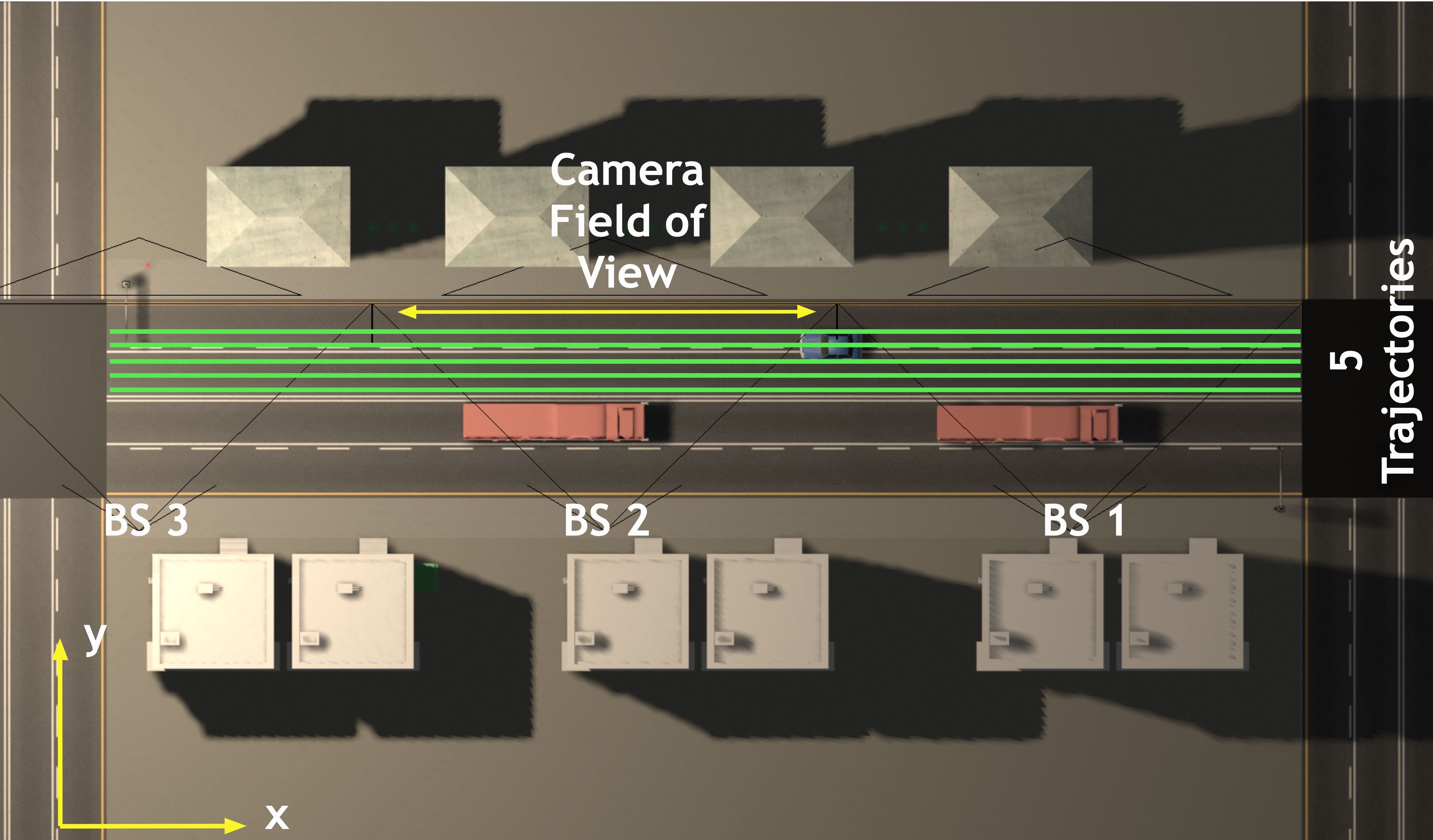
Overview: This scenario, "dist_cam_blk", is an outdoor scenario depicting a single car driving through a city street with two stationary buss. It has three Base Stations (BSs), each is equipped with a mmWave antenna and an RGB camera.
Key components:
Base Station: It has one mmWave antenna and one camera with a 100-degree field of view. The BSs are set at 5 meters high and 30 meters apart.
Car trajeectories: The car goes through one of five trajectories, each of which is 90 meters long and has 1000 equally spaced points (0.089 m). Hence, they, all together, creeate a 5000-point user grid.
Version support: Version 1
Data filees for the dist_cam_blk Scenario
Source data:
Scenario name: ‘dist_cam_blk’
Link: Available here
5) The Distributed-Camera Scenario with Direct View (Single User)
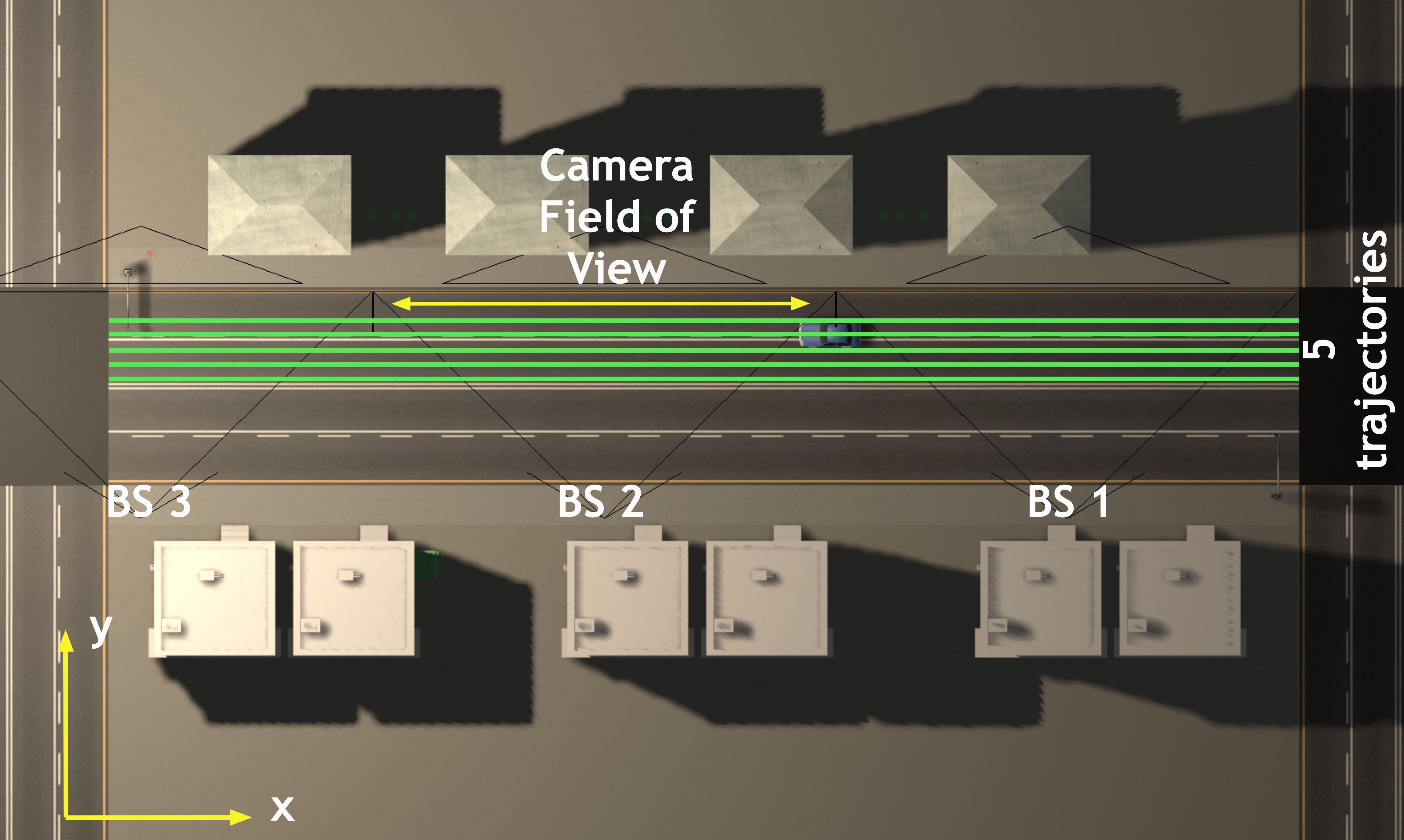

Description of the Scenario
Overview: This scenario, "dist_cam", is an outdoor scenario depicting a single car driving through a city street with two stationary buss. It has three Base Stations (BSs), each is equipped with a mmWave antenna and an RGB camera.
Key components:
Base Station: It has one mmWave antenna and one camera with a 100-degree field of view. The BSs are set at 5 meters high and 30 meters apart.
Car trajeectories: The car goes through one of five trajectories, each of which is 90 meters long and has 1000 equally spaced points (0.089 m). Hence, they, all together, creeate a 5000-point user grid.
Version support: Version 1
Data filees for the dist_cam Scenario
Source data:
Scenario name: ‘dist_cam’
Link: Available here
Citation and License
In order to use the ViWi datasets/codes or any (modified) part of them, please cite
- The ViWi paper: M. Alrabeiah, A. Hredzak, Z. Liu, and A. Alkhateeb,"ViWi: A Deep Learning Dataset Framework for Vision-Aided Wireless Communications" submitted to IEEE Vehicular Technology Conference, Nov. 2019.
@InProceedings{Alrabeiah19,
author = {Alrabeiah, M. and Hredzak, A. and Liu, Z. and Alkhateeb, A.},
title = {ViWi: A Deep Learning Dataset Framework for Vision-Aided Wireless Communications},
booktitle = {submitted to IEEE Vehicular Technology Conference},
year = {2019},
month = {Nov.},
} - The Remcom Wireless InSite website: Remcom, Wireless insite,
https://www.remcom.com/wireless-insite
The ViWi dataset is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License
 .
.
Join the ViWi mailing list!
Please provide your contact information to get the latest updates about the ViWi dataset